We advise to use the scan mapping mode even for point-sources, in a so-called "mini-scan map" configuration, with short (3 arcmin) scan legs. The advantages for the scan map mode over the chop-nod point source mode are:
- better point-source sensitivity in all bands as a high-pass filter can be used to remove 1/f noise up to higher frequencies.
- it provides a better characterisation of the close vicinity of the target and larger scale structures in the background
- also targets with positional uncertainties of 10 arcsec or more are still perfectly covered
- the final map has a much larger area of homogeneous coverage (about 50 arcsec in diameter) depending on observation configuration.
- more pixels see the target, the impact of noisy, variable and dead pixels is less problematic
- no negative beam in final map.
In case of using the scan map mode for point-sources and very small fields we propose the following configuration:
- medium scan speed (20 arcsec/s)
- scan angle in array coordinates along the array diagonal: 110 or 70 degrees
- scan length: 3.0, (the array diagonal has about 4 arcmin). The source is on-array during satellite constant-speed parts if the observer follows the mini scan-map recommendations, but during satellite turn-arounds and acceleration and deceleration phases the source is outside the array. In order to have the source always on-array during all phases one should select a scan-leg length of 2.5 arcmin. Note that scan-legs have to be multiples of 5 arcsec.
- small and even number of scans: 4, 6, 8, 10, ... for minimisation of satellite movements and a match to the array diagonal.
- small leg separation: 2...5 arcsec with the smaller separation for a larger number of scan legs and vice versa (to have the source on-array in all legs). Examples: 8 scan legs of 3 arcmin length and 4 arcsec separation. This map would then match a sky region with the width of about 3xFWHM in the red band with very high coverage.
- repetition factor: as needed to reach the required sensitivity
- cross-scan maps: it allows to apply all kinds of map-making techniques and not just the high-pass filtering. The cross-scans are also useful to obtain higher photometric accuracy for faint sources and better spatial characterisation in the near source vicinity. It is recommended to group/concatenate the 2 cross-scan AORs to minimise slew overheads. Each AOR will have its own 30 s calibration block.
![[Warning]](../../admonitions/warning.png) | Warning |
|---|---|
| Do not use the homogeneous coverage in mini-scan map mode ! |
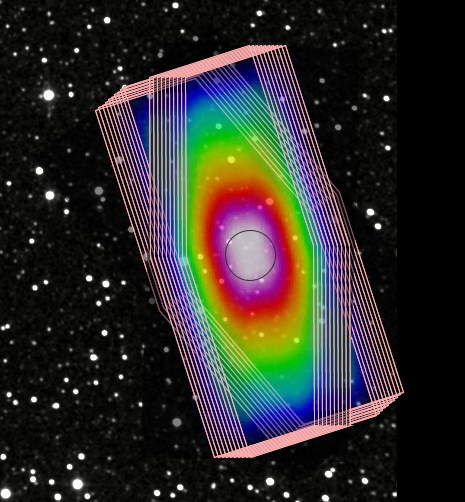
Figure 5.8. Coverage map for 2 mini scan-maps at array angles of 70 and 110 degrees. The homogeneous, high-coverage area (circle) is about 50 arcsec in diameter.
The 1 hour point-source sensitivities that can be achieved with this mode are reported Table 3.3
![[Note]](../../admonitions/note.png) | Note |
|---|---|
| The sensitivity in miniscan map mode is returned in the column "central area point-source sensitivity" in the "instrument performance summary" window. |
Otherwise the sensitivity in the central area of the mini-scan map mode can also be directly estimated using the formula in Section 5.2.3 and computing T (on source integration time) as follows:
T = (scan_leg_length/20) * number_of legs * map_repetition_factor